588ВУ2
| Этот документ создан для Emuverse и распространяется на условиях лицензии CC-BY-SA-3.0. |
К588ВУ2 (КР588ВУ2, КА588ВУ2) — микросхема управляющей памяти микрокоманд из микропроцессорного комплекта 588.
Кодировки
Всего есть 7 типов (кодировок) микросхем 588ВУ2: 0001..0007, вместе они реализуют систему команд компьютера «Электроника-60» (ОСТ 11 305.909-82), за исключением команд FIS (операций с плавающей запятой).
| Кодировка | Применение |
|---|---|
| 0001..0004 | Управление арифметико-логическим устройством (АЛУ) 588ВС2. Четыре микросхемы 0001..0004 соединяются параллельно, на входы МС0..МС3 подаётся слово-состояние (Z, V, С, N), с выходов передаётся информация в АЛУ: 12-разрядный код является собственно микрокомандой для АЛУ; разряд 12 используется в качестве строба микрокоманды. |
| 0005 | Разрядами 0..6 вырабатывает сигналы разрешения прерывания, разряды 7..12 управляют системным контроллером 588ВГ1 |
| 0006 | Управление арифметическим умножителем 16×16 588ВР2 для реализации команд расширенной арифметики (MUL, DIV, ASH, ASHC) |
| 0007 | Разрядами 0..6 вырабатывает сигналы разрешения прерывания, разряды 7..12 управляют системным контроллером 588ВГ1 |
Назначение выводов
| Номер вывода |
Назначение | Обозначение (Гришин) |
Обозначение (Шахнов) |
Обозначение (Хвощ) |
Тип |
|---|---|---|---|---|---|
| 1..4 | Магистраль состояния | МС0..МС3 | K2(0..3) | DS(0..3) | Вход |
| 5..20 | Шина команд | Д0..Д15 | K1(0..15) | DC(0..15) | Вход |
| 21 | Общий | GND | GND | — | |
| 22..34 | Магистраль микрокоманд | МК0..МК12 | MNS0..12 | MI(0..12) | Вход |
| 35 | Не используется | — | — | — | — |
| 36 | Завершение выполнения микрокоманды | Ф1 | F1 | F | Вход |
| 37 | Установка / Пуск 1 | R1 | R1 | R1 | Вход |
| 38 | Конец команды | КК | ENDNS | END | Вход-выход |
| 39 | Установка / Пуск 2 | R0 | R0 | R0 | Вход |
| 40 | Команда принята | П | IPA | S | Выход |
| 41 | Команда выдана | В | OPA | STB | Вход |
| 42 | Напряжение питания | Ucc | Ucc | Ucc | — |
Описание (Гришин)

Представляет управляющую память микрокоманд (УП). Основой УП являются программируемые логические матрицы ПЛМ. Программирование УП выполняют на заводе-изготовителе масочным способом. В настоящее время выпускают семь типов УП — К588ВУ2-0001 … К588ВУ2-0007. Кодировки микросхем УП полностью реализуют систему команд микроЭВМ «Электроника-60» и операции расширенной арифметики. К последним относятся команды умножения, деления, сдвига. Кодировка К588ВУ2-0005 содержит микропрограммы работы микросхемы системного контроллера.
На рис. 6.1 и 6.2 изображены соответственно условное графическое обозначение и структурная схема БИС УП. В табл. 6.2 дано назначение выводов этой микросхемы.
В состав структурной схемы БИС УП входят следующие функциональные узлы:
регистр команд РК; принимает команду по шине команд Д;
программируемые логические матрицы ПЛМ1 и ПЛМ2; в них запрограммированы не только информация о выбираемой микрокоманде и адрес следующей микрокоманды, но и разряды, управляющие внутренними узлами БИС УП;
регистры состояния PC и следующего адреса РСА; принимают соответственно признаки результата выполнения операции и адрес следующей микрокоманды. Информация состояния поступает, как правило, из арифметического устройства и включает 4-разрядное слово-состояние, состоящее из признаков нулевого результата, переполнения, переноса из старшего знакового разряда (Z, V, С, N);
регистры управления РУ и микрокоманд РМ;
блок синхронизации БСЗ; вырабатывает управляющие сигналы записи во внутренние регистры БИС УП и сигнал квитирования П, свидетельствующий об окончании приема команды. На БСЗ поступают разряды регистра РУ.
Функционирование БИС УП начинается с подачи на входы R0 и R1 отрицательных сигналов, которые переводят БИС в исходное состояние. Длительность сигналов R0 и R1 не менее 500 нс.
Работа микросхемы УП начинается по положительному фронту сигнала R0 (либо R1). По отрицательному сигналу В происходит прием команды во входной регистр РК, а также информации состояния в регистр PC. После приема этой информации БИС УП выдает отрицательный сигнал П, свидетельствующий о том, что команда принята. Отрицательный фронт сигнала П инициирует положительный фронт сигнала В, который, в свою очередь, сбрасывает сигнал П в состояние «1».
Затем начинается выдача первой микрокоманды принятой команды. Положительный фронт сигнала Ф1 инициирует выдачу очередной микрокоманды на магистраль МК. Микрокоманда может находиться на магистрали до отрицательного фронта сигнала Ф1. После этого происходит «подброс в единицу» магистрали МК. Если к этому времени сформирована следующая микрокоманда, то происходит ее запись в РМ с последующей выдачей. Одновременно с выдачей последней микрокоманды текущей команды выдается сигнал КК, сигнализирующий контроллеру (либо внешнему ЗУ) о необходимости подачи новой команды.
На рис. 6.3 приведена временная диаграмма работы БИС УП.
Реализация всей системы команд микроЭВМ «Электроника-60» и ограниченные возможности внутренних ПЛМ БИС УП привели к необходимости использования не менее пяти «зашивок» микрокоманд в БИС УП (0001 … 0005). Первые четыре реализуют собственно команды «Электроники-60», пятая — управляет системным контроллером и разрешением прерываний. Четыре микросхемы БИС УП (0001 … 0004) соединяются параллельно (по выходам) и выдают информацию в арифметическое устройство (АУ); 12-разрядный код является собственно микрокомандой для АУ. Разряд 12 используется в качестве строба микрокоманды. Микросхема К588ВУ2-0005 разрядами 0…6 вырабатывает сигналы разрешения прерывания, разряды 7…12 управляют микросхемой К588ВГ1 (КР588ВГ1).
В табл. 6.3 приведены основные электрические параметры БИС УП.
-

Рис. 6.1. Условное графическое обозначение микросхемы К588ВУ2
-
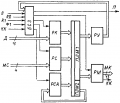
Рис. 6.2. Структурная схема микросхемы К588ВУ2
-
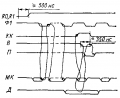
Рис. 6.3. Временная диаграмма работы микросхемы К588ВУ2


Описание (Шахнов)

Микросхема К588ВУ2 — микропрограммная управляющая память (УП), предназначена для применения совместно с микросхемами К588ВС2, К588ВГ1 в процессоре микро-ЭВМ.
Условное графическое обозначение микросхемы приведено на рис. 8.6, назначение выводов — в табл. 8.12, структурная схема показана на рис. 8.7, временная диаграмма работы — на рис. 8.8.
В состав микросхемы входят: две программируемые логические матрицы (ПЛМ1, ПЛМ2); блок синхронизации (БС); регистр команд (РК); регистр состояний (РС); регистр следующего адреса (РСА); регистр микрокоманд (РМ); блок программируемых инверторов (БПИ); схема выдачи (СВ).
Связи ПЛМ1, ПЛМ2 и подключение БПИ программируются фотошаблоном в процессе изготовления микросхемы.
Регистры команд и состояний предназначены для приема и хранения поступающей извне информации, РСА — для запоминания 7-разнядного следующего адреса, считанного из ПЛМ2, РМ — для записи считанной микрокоманды.
Блок синхронизации предназначен для формирования внутренних сигналов, задающих временную диаграмму работы УП.
Схема выдачи предназначена для организации выдачи микрокоманды из РМ на внешние выводы.
Для обеспечения правильной работы УП после включения питания следует провести начальную установку. Для этого на один из выводов R0 или R1 подается импульс длительностью не менее 0,5 мкс. Этот импульс вызывает установку БС в исходное состояние и соответствующего значения РСА. Одновременная подача синфазных импульсов по входам R1 и R0 не допускается.
По положительному фронту сигнала на выводе R0 или R1 УП переходит к формированию микрокоманды. Сформированная микрокоманда записывается в РМ, и УП переходит к формированию следующей микрокоманды. Одновременно с хранением и выдачей микрокоманды в РМ УП формирует следующую микрокоманду.
По отрицательному фронту сигнала на входе F1 прекращается выдача микрокоманды и устанавливается высокий уровень на выводах микрокоманды. Если к этому моменту сформирована следующая микрокоманда, то происходит ее запись в РМ с последующей выдачей.
Если в микрокоманде сформирован признак ENDNS, то на выводе ENDNS формируется высокий уровень. Для дальнейшей работы необходимо подать сигнал на вывод OPA. При наличии сигнала на выводе OPA происходит прием информации с магистрали K1 во входной регистр РК и по магистрали K2 в регистр РС.
Для правильного приема информации необходимо устанавливать и снимать информацию одновременно с отрицательным н положительным фронтами сигнала OPA соответственно.
Приняв информацию в РК и РС, УП отвечает по выводу IPA и устанавливает активный низкий уровень на выводе ENDNS. По снятии сигнала на выводе OPA снимается сигнал IPA.
Приняв информацию в РК, УП приступает к формированию новой микрокоманды.
Прием информации в РС может быть осуществлен также под управлением специального внутреннего сигнала, формируемого в ПЛМ2 одновременно с микрокомандой. В этом случае информация в РС принимается по отрицательному фронту сигнала на входе F1, сбрасывающего эту микрокоманду.
С целью расширения объема управляющей памяти несколько микросхем могут быть объединены в блок управляющей памяти. Структурная схема такого объединения микросхем приведена на рис. 8.9.
Основные параметры К588ВУ2 приведены в табл. 8.13.
-

Рис. 8.6. Условное графическое обозначение К588ВУ2
-
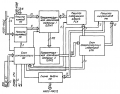
Рис. 8.7. Структурная схема К588ВУ2
-

Рис. 8.8. Временная диаграмма работы К588ВУ2


Описание (Хвощ)

Микросхема УП предназначена для управления работой микроЭВМ и сочетает в себе функции БИС блока микропрограммного управления и ПЗУ-микрокоманд. Микросхемы с номерами кодировок 0001-0004 предназначены для управления ЦПЭ, а БИС с кодировкой 0005 — для управления системным контроллером в составе процессоров с системой команд ЭВМ «Электроника-60», включая операции расширенной арифметики (умножение, деление, сдвиги — MUL, DIV, ASH, ASHC).
Структура УП показана на рис. 6.2, а. В состав БИС входят: регистр адреса микрокоманды (RGA); регистр состояний (RGS); регистр команд (RGC); конвейерный регистр микрокоманд (RGMI); блок синхронизации (CLG); программируемая логическая матрица (PLA); регистр кодов управления УП (MIR).
Описание выводов УП приведено в табл. 6.7. Низкий потенциал на входах R0 или R1 устанавливают БИС в исходное состояние, положительный фронт переводит ее в состояние формирования микрокоманды. Считанные из PLA микрокоманды содержат три поля: адреса следующей микрокоманды (RGA); кода текущей микрокоманды (RGMI); кода управления (MIR).
Содержимое MIR задает операции по записи признаков в RGS, команд в RGS и адресов в RGA. Если в микрокоманде сформирован признак конца команды (END), то на одноименный вывод подается сигнал высокого потенциала (tCn). Для дальнейшей работы необходимо сменить код команды в RGS, что сопровождается квитированием приема кода по шине DC(15-0) сигналами S — STB. Прием низкого потенциала на входе STB инициирует начало обработки новой команды и считывание первой ее микрокоманды (tC1) из PLA.
Временная диаграмма работы УП приведена на рис. 6.2, б. Синхронизация УС с устройствами, исполняющими микрокоманды, производится по выводам F — S. Одновременно с исполнением текущей микрокоманды, хранящейся в RGMI, УП производит выборку из PLA следующей. По отрицательному фронту сигнала F прекращается выдача микрокоманды и происходит «подброс» в высокий потенциал состояния выводов MI(12-0). Если к этому времени сформирована следующая микрокоманда, то происходит ее запись в регистры с последующей выдачей. Ниже приведены основные временные параметры БИС:
- Время установки в исходное состояние tR, нc . . . . . . . ≥ 500
- Время приема команды tBE, нс . . . . . . . ≤ 350
- " цикла исполнения микрокоманды tC, мкс . . . . . . . ≥ 0,8
Форматы микрокоманд, управляющих ЦПЭ и интерфейсом микроЭВМ, приведены на рис. 6.2, в. Один из разрядов микрокоманд для ЦПЭ и СК играет роль сигнала выборки кристалла (CS) и кодируется во всех микрокомандах нулем.
Система команд
Система команд и распределение команд по кодировкам микросхем 588ВУ2, согласно Немига/ТО#Приложение_1.
───────────────────┬───────────────┬─────────────────────┬─────────
Код команды │ Признаки │ │ Номер
──────────┬────────┼───┬───┬───┬───┤ Содержание команды │кодировки
Мнемоника │8-ричный│ N │ Z │ V │ C │ │
──────────┼────────┼───┼───┼───┼───┼─────────────────────┼─────────
CLR (A) │*050DD │ 0 │ 1 │ 0 │ 0 │Очистка │ 0001
COM (A) │*051DD │ + │ + │ 0 │ 1 │Инвертирование │ 0001
INC (A) │*052DD │ + │ + │ + │ - │Инкрементация │ 0001
DEC (A) │*053DD │ + │ + │ + │ - │Декрементация │ 0001
NEG (A) │*054DD │ + │ + │ + │ + │Дополнение │ 0001
ADC (A) │*055DD │ + │ + │ + │ + │Сложение с переносом │ 0001
SBC (A) │*056DD │ + │ + │ + │ + │Вычитание переноса │ 0001
TST (A) │*057DD │ + │ + │ 0 │ 0 │Проверка │ 0001
ROR (A) │*060DD │ + │ + │ + │ + │Сдвиг цикл.правый │ 0001
ROL (A) │*061DD │ + │ + │ + │ + │Сдвиг цикл.левый │ 0001
ASR (A) │*062DD │ + │ + │ + │ + │Сдвиг арифм.правый │ 0001
ASL (A) │*063DD │ + │ + │ + │ + │Сдвиг арифм.левый │ 0001
MOV (A,B) │*1SSDD │ + │ + │ 0 │ - │Пересылка │ 0001
CMP (A,B) │*2SSDD │ + │ + │ + │ + │Сравнение │ 0001
BIT (A,B) │*3SSDD │ + │ + │ 0 │ - │Проверка разрядов │ 0001
BIC (A,B) │*4SSDD │ + │ + │ 0 │ - │Очистка разрядов │ 0001
BIS (A,B) │*5SSDD │ + │ + │ 0 │ - │Логическое "ИЛИ" │ 0001
ADD (A,B) │06SSDD │ + │ + │ + │ + │Сложение │ 0001
SUB (A,B) │16SSDD │ + │ + │ + │ + │Вычитание │ 0001
──────────┼────────┼───┼───┼───┼───┼─────────────────────┼─────────
NOP │000240 │ │ │ │ │Нет операции │ 0002
CLC │000241 │ - │ - │ - │ 0 │Очистка "С" │ 0002
CLV │000242 │ - │ - │ 0 │ - │Очистка "V" │ 0002
CLZ │000244 │ - │ 0 │ - │ - │Очистка "Z" │ 0002
CLN │000250 │ 0 │ - │ - │ - │Очистка "N" │ 0002
SEC │000261 │ - │ - │ - │ 1 │Установка "С" │ 0002
SEV │000262 │ - │ - │ 1 │ - │Установка "V" │ 0002
SEZ │000264 │ - │ 1 │ - │ - │Установка "Z" │ 0002
SEN │000270 │ 1 │ - │ - │ - │Установка "N" │ 0002
SCC │000277 │ 1 │ 1 │ 1 │ 1 │Установка "С", "V" │ 0002
│ │ │ │ │ │ "Z", "N" │
CCC │000257 │ 0 │ 0 │ 0 │ 0 │Очистка "С", "V" │ 0002
│ │ │ │ │ │ "Z", "N" │
SWAB │0003DD │ + │ + │ 0 │ 0 │Перестановка байтов │ 0002
MARK │0064NN │ - │ - │ - │ - │Восстановление указа-│ 0002
│ │ │ │ │ │теля стека │
XOR (R,A) │074RDD │ + │ + │ 0 │ - │Исключающее "ИЛИ" │ 0002
BR (A) │0004XXX │ │Ветвление безусловное│ 0002
BNE (A) │0010XXX │ Z=0 │Ветвление, если =0 │ 0002
BEQ (A) │0014XXX │ Z=1 │Ветвление, если =0 │ 0002
BGE (A) │0020XXX │ NOV=0 │Ветвление, если >0 │ 0002
BLT (A) │0024XXX │ NOV=1 │Ветвление, если <0 │ 0002
BGT (A) │0030XXX │ ZV(NOV)?0 │Ветвление, если >0 │ 0002
BLE (A) │0034XXX │ ZV(NOV)=1 │Ветвление, если <0 │ 0002
SOB (A) │077RNN │ Z=0 │Вычитание единицы, │ 0002
│ │ │если результат =0 │ 0002
BPL (A) │1000XXX │ N=0 │Ветвление, если + │ 0002
BMI (A) │1004XXX │ N=1 │Ветвление, если - │ 0002
BHI (A) │1010XXX │ ZVC=0 │Ветвление, если > │ 0002
BLOS (A) │1014XXX │ ZVC=1 │Ветвление, если < │ 0002
BVC (A) │1020XXX │ V=0 │Ветвление, если нет │ 0002
│ │ │переполнения │ 0002
BVS (A) │1024XXX │ V=1 │Ветвление, если │ 0002
│ │ │переполнение │ 0002
BHIS (A) │1030XXX │ C=0 │Ветвление, если нет │ 0002
│ │ │переноса │
BLO (A) │1034XXX │ C=1 │Ветвление, если │ 0002
│ │ │перенос │
SXT (A) │0067DD │ - │ + │ 0 │ - │Расширение знака │ 0002
MTPS (A) │1064SS │ + │ + │ + │ + │Запись ССП │ 0002
MFPS (A) │1067DD │ - │ + │ 0 │ - │Чтение ССП │ 0002
──────────┼────────┼───┴───┴───┴───┼─────────────────────┼─────────
HALT │000000 │ │Останов │ 0004
WAIT │000001 │ │Ожидание │ 0004
RTI │000002 │ │Возврат из прерыва- │ 0004
│ │ │ния │
BPT │000003 │ │Прерыв.для отладки │ 0004
IOT │000004 │ │Прерыв.для ВВ/ВЫВ │ 0004
RESET │000005 │ │Сброс │ 0004
RTT │000006 │ │Возврат из прерыва- │ 0004
│ │ │ния │
JMP (A) │0001DD │ │Безусловный переход │ 0004
RTS (R) │00020R │ │Возврат из подпрогр. │ 0004
JSR (R,A) │0004RDD │ │Переход к подпрограм-│ 0004
│ │ │ме │
EMT │104000- │ │Командное прерывание │ 0004
│104377 │ │ │
TRAP │104400- │ │Командное прерывание │ 0004
│104777 │ │ │
──────────┼────────┼───┬───┬───┬───┼─────────────────────┼─────────
MUL (R,A) │070RSS │ + │ + │ 0 │ + │Умножение │ 0006
DIV (R,A) │071RSS │ + │ + │ + │ + │Деление │ 0006
ASH (R,A) │072RSS │ + │ + │ + │ + │Многоразрядный сдвиг │ 0006
ASHC (R,A)│073RSS │ + │ + │ + │ + │Сдвиг комбинированный│ 0006
──────────┴────────┴───┴───┴───┴───┴─────────────────────┴─────────
П р и м е ч а н и я:
1. R - восьмеричный код РОН (0-7);
SS - поле адресации операнда источника;
DD - поле адресации операнда приемника;
* - операция производится над байтом, если * = 1
над словом, если * = 0;
XXX - смещение (8 разрядов);
NN - смещение (6 разрядов).
2. В графе "признаки" указаны значения признаков N,Z и C,V
слова состояния процессора, которые устанавливаются после выполнения
процессором каждой команды. Знак "+" означает, что данный разряд ССП
будет установлен в "0" или "1" в зависимости от результата выполне-
ния команды. Знак "-" означает, что команда не оказывает воздействия
на данный разряд ССП.
3. B графе 8 указан номер кодировки микросхемы КР588ВУ2‚ отве-
чающей за выполнение соответствующей команды.
Литература
- [Гришин] Г. Г. Гришин, А. А. Мошков, О. В. Ольшанский, Ю. А. Овечкин. Микропроцессоры: Справочное пособие для разработчиков судовой РЭА. Л.: Судостроение, 1987. Глава 6. МИКРОПРОЦЕССОРНЫЙ КОМПЛЕКТ СЕРИИ К588 (КР588)
- [Шахнов] Микропроцессоры и микропроцессорные комплекты интегральных микросхем: Справочник. В 2 т. / Под ред. В. А. Шахнова. — М.: Радио и связь, 1988. — T. 1. — 368 с.: ил.
- [Хвощ] Хвощ С. Т. Микропроцессоры и микроэвм в системах автоматического управления.